研發動態
成大機械系劉彥辰團隊結合機器學習提出新型態架構 大幅提升無人旋翼機動態性能
文、圖/張怡婷

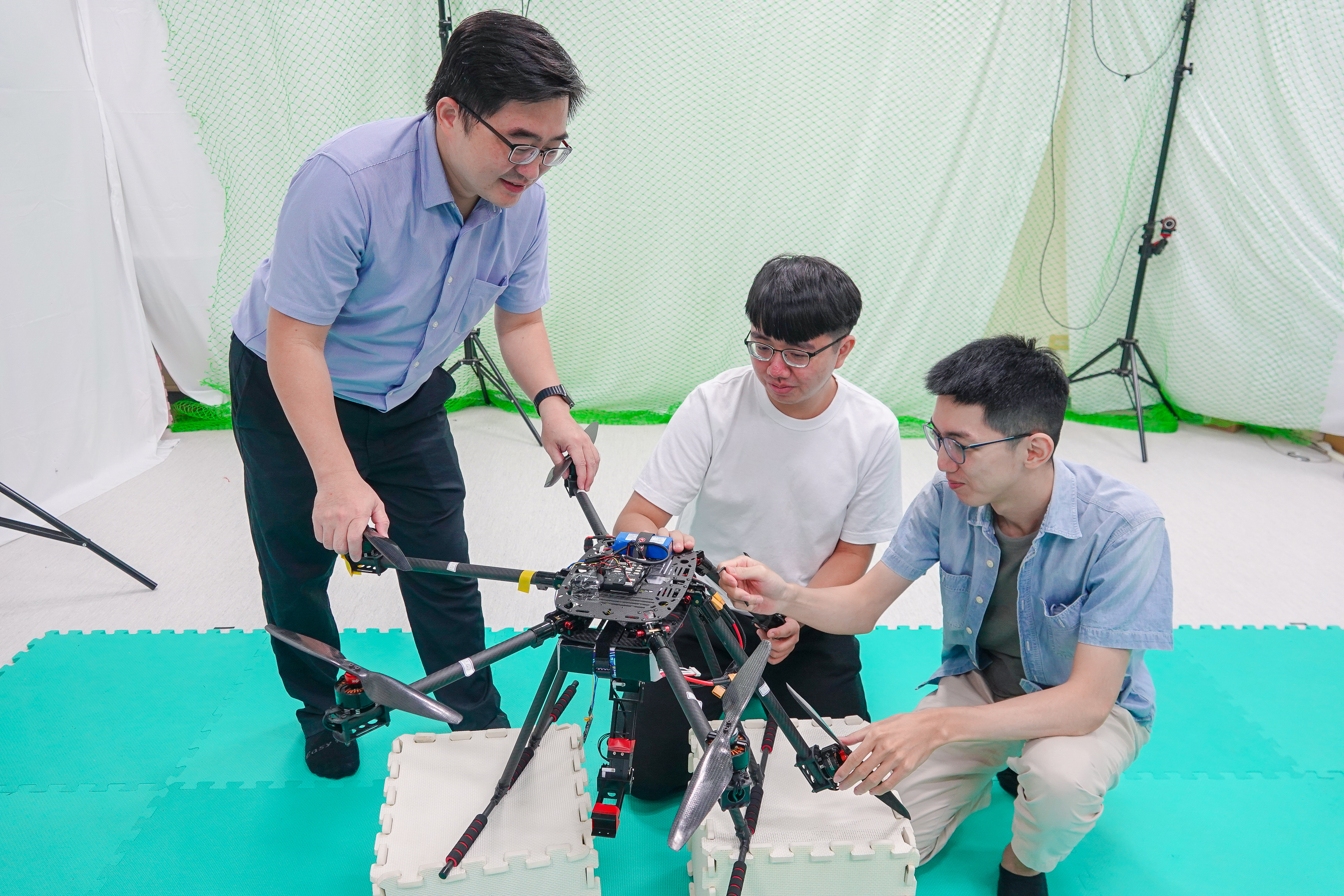
機械系劉彥辰教授(中)與團隊結合機器學習提出新型態無人旋翼機架構
帶臂旋翼機近年來蓬勃發展,在建築、農業、遙測等領域都能看到其應用。為了解決帶臂旋翼機動態移動下不穩定的控制性能,國立成功大學機械工程學系教授劉彥辰帶領團隊提出新型態的解耦控制架構,結合「DDPG(Deep Deterministic Policy Gradient)深度學習」方法以及傳統控制策略,將旋翼機以及下方連接的機械手臂分別進行控制,減少飛行載物時,空氣動力與重物對旋翼機動態造成的影響,有效提升整體系統性能。

帶臂旋翼機除了調整飛行方向,還須調整機械手臂移動位置,計算模型相當複雜
帶臂旋翼機是常見用來載貨的無人旋翼機之一,意指在旋翼機底下加裝機械手臂,除了機體本身的飛行方向控制,還需調整機械手臂擺動的角度、方向、夾取功能等,控制參數多,導致傳統的帶臂旋翼機往往計算模型龐大且複雜,加上機械手臂的移動亦會同時影響旋翼機的飛行姿態,夾取物品時的質量改變也容易讓旋翼機突然上升或高度下降。
劉彥辰教授指出,團隊結合近年來熱門的機器學習,提出的新形態「解耦控制架構」。把旋翼機與機械手臂分為兩個獨立系統來控制,不僅模型相對簡單,也能有效提升計算效率,讓機器在收到指令的當下更快速做出反應動作,能夠準確夾取物品及到達定位點,在旋翼機無法直接到達的地方,也能透過調整機械手臂來完成目標,整體運作品質大為提升,此項突破性研究在 2022 年 8 月登上國際頂尖期刊
IEEE Transactions on Cybernetics。
成大團隊透過虛擬機器人實驗平台「V-REP」建立帶臂旋翼機模型,以 DDPG 模式來進行強化學習,目的是讓智能體與周圍環境互動,嘗試以不同的「行為」得到最大的「獎勵」,接著再將完成的模組套入帶臂旋翼機進行試飛。
結合深度學習,成大團隊有效提升旋翼機系統性能
參與研究的博士生劉凱元指出,理想上透過不斷模擬訓練,久了之後智能體就會知道執行怎樣的動作會得到較高的獎勵。「但有時候機器的思考邏輯跟人其實不一樣」,劉凱元解釋,機器有它自己的運算策略,有時我們以為很好的獎勵其實不是機器想要的,也曾遇過雖然到達目的地,但卻是「繞遠路」才完成,因此團隊就必須要反覆嘗試、持續修正,才能設計出效益最高、飛行最穩定的計算模組。
帶臂旋翼機高度的靈活性,相比一般無人搬運車只能在地面上移動,旋翼機兼具 3D 立體空間移動的概念,能夠超越地形限制。劉彥辰教授也提到,其應用領域相當多元,像是在難以到達的茂密叢林、陡峭懸崖、河谷橋梁或是不便停留的廣闊海面上執行空拍探測、救災載物等工作,也能取代傳統在聳立高樓外清潔玻璃、刷油漆的人力作業;興建橋梁或房屋工程時,透過多台帶臂旋翼機同時運行,也能進行搬運鋼條、建材等應用。
除了單一台帶臂旋翼機的運作,成大團隊目前也正著手進行多台旋翼機同時操控的進階研究。劉彥辰指出,多台旋翼機存在的變因比單一機台來得多更多,像是軌跡追蹤、位置控制、協同搬運等,都是目前需要精進且探討的重點,期待未來能順利將新形態架構套用到多台旋翼機上,開創更多靈活的發展應用,促進科技日益便利與進步。

劉彥辰教授實驗室團隊
維護單位: 新聞中心
更新日期: 2022-10-13